自律移動ロボット協調動作の理論的解析
概要
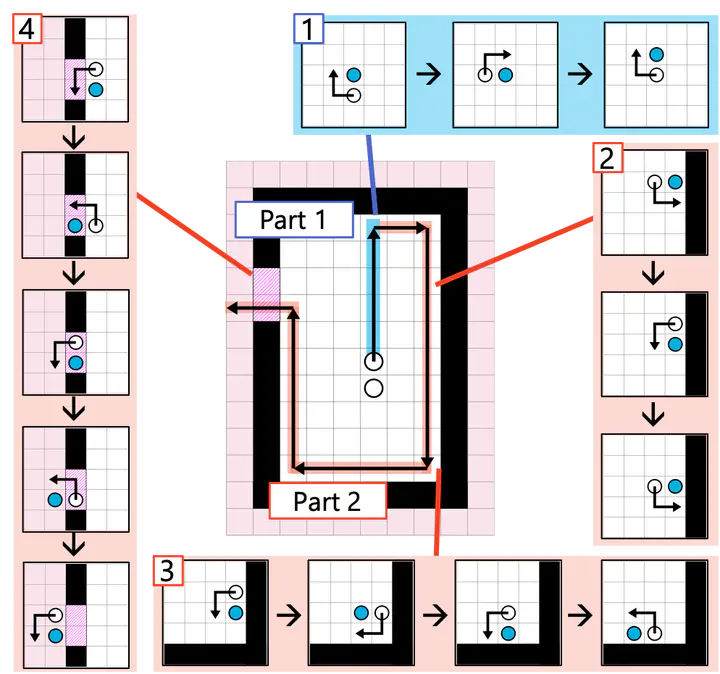
新しい分散システムの実現形態として,自律的に環境を移動して情報収集する移動ロボットが注目を集めています. 個々の自律移動ロボットは限られた機能しか持ちませんが,複数のロボットが個々に集めた情報を持ち寄り協調することで,高度なタスクを達成できます. 本研究室では,理論計算機科学の観点から,タスクを達成するために必要となるロボットの機能や時間複雑度を明らかにすることを目指します. ロボットのモデルは,メモリや通信機能の有無や,フィールドの定義(連続・離散平面)など,様々なバリエーションがあります.
キーワード
分散アルゴリズム,移動ロボット,モバイルエージェント
関連論文
- J. Nakamura, S. Kamei and Y. Yamauchi: “Evacuation from various types of finite two-dimensional square grid fields by a metamorphic robotic system”, Concurrency and Computation: Practice and Experience, p. e6628 (2021).
- Y. Sudo, M. Shibata, J. Nakamura, Y. Kim and T. Masuzawa: “Self-stabilizing Population Protocols with Global Knowledge”, IEEE Transactions on Parallel and Distributed Systems, 32, 12, pp. 3011–3023 (2021).
- J. Hirose, J. Nakamura, F. Ooshita and M. Inoue: “Weakly Byzantine Gathering with a strong team”, IEICE Transactions on Information and Systems, E105-D, 3, pp. 541-555 (2022).