Theoretical Analysis of Cooperative Behavior by Autonomous Mobile Robots
Abstract
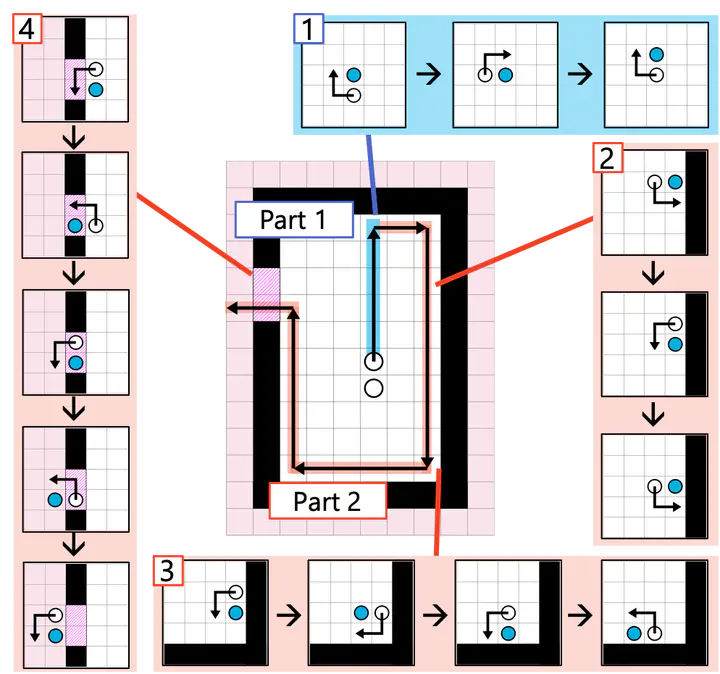
Autonomous mobile robot attracts much attention as a new distributed system implementation. A mobile robot moves autonomously in an environment and collects information. Although each autonomous mobile robot has limited functions, multiple robots can exchange information collected individually and perform advanced tasks cooperatively. From the viewpoint of theoretical computer science, we aim to clarify the functions and complexities of mobile robots required to solve various tasks. The robot model has many variations, such as the presence or absence of memory and communication functions and the definition of fields (continuous and discrete planes).
Keywords
distributed algorithms, mobile robot, mobile agent
Publications
- J. Nakamura, S. Kamei and Y. Yamauchi: “Evacuation from various types of finite two-dimensional square grid fields by a metamorphic robotic system”, Concurrency and Computation: Practice and Experience, p. e6628 (2021).
- Y. Sudo, M. Shibata, J. Nakamura, Y. Kim and T. Masuzawa: “Self-stabilizing Population Protocols with Global Knowledge”, IEEE Transactions on Parallel and Distributed Systems, 32, 12, pp. 3011–3023 (2021).
- J. Hirose, J. Nakamura, F. Ooshita and M. Inoue: “Weakly Byzantine Gathering with a strong team”, IEICE Transactions on Information and Systems, E105-D, 3, pp. 541-555 (2022).